

具身智能操作系统
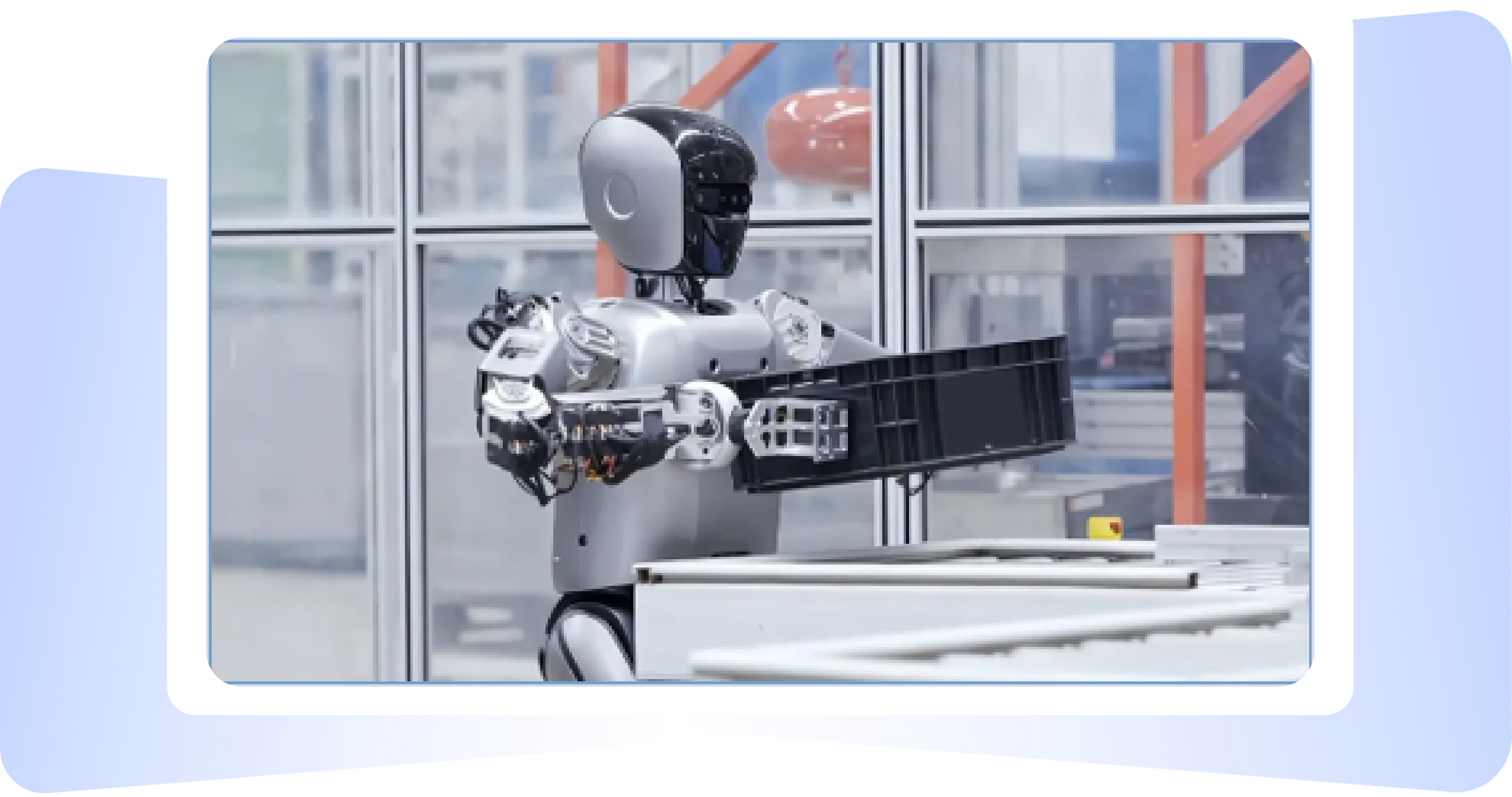
智能机器人本体和控制器
提供从机器⼈选型到集成部署的全流程⽀持,满⾜客⼾的个性化需求
基于⾼算⼒云化控制器的机器⼈控制,提供弹性⾼算⼒和⾼速智能控制
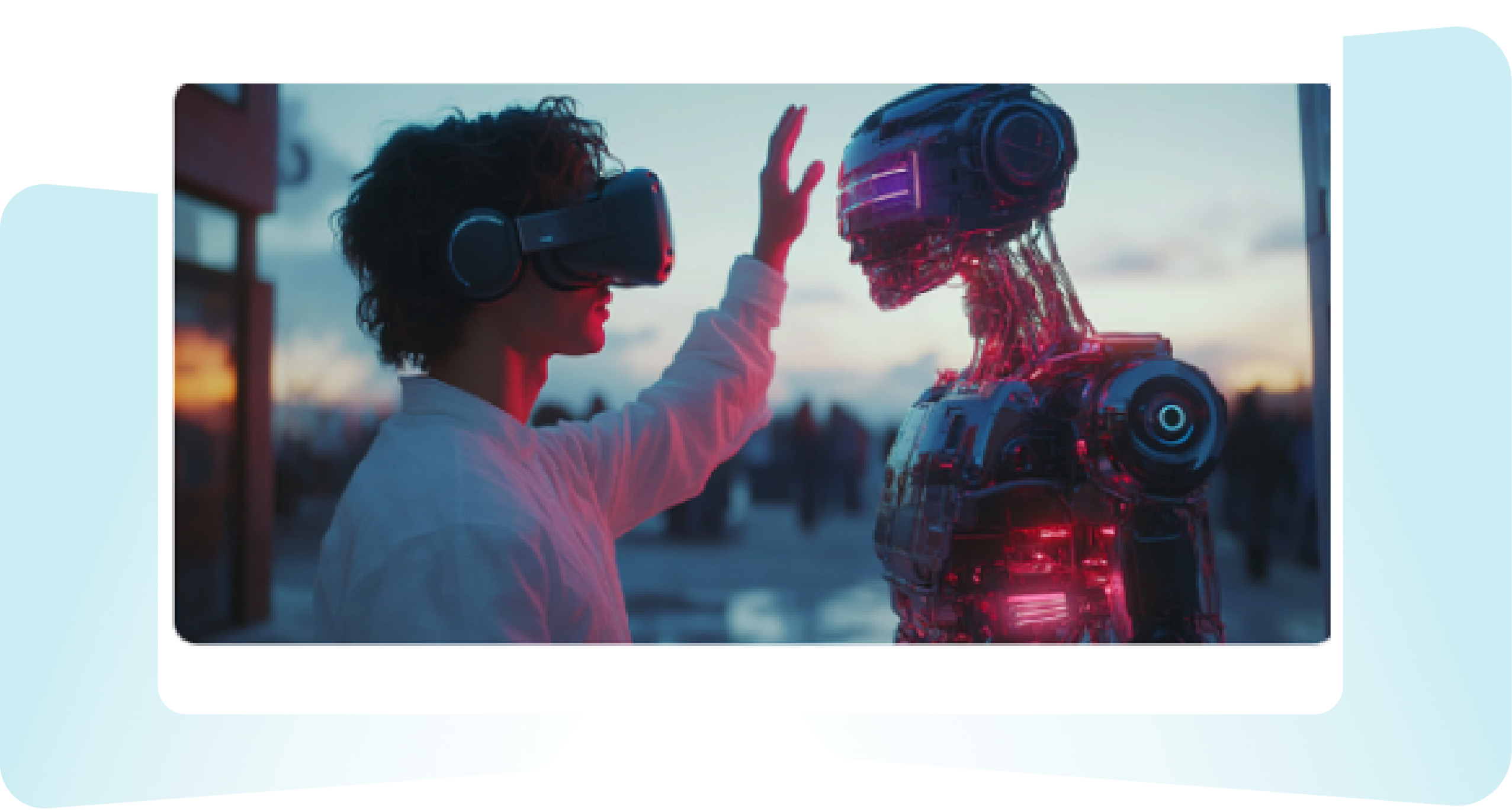
物理训练平台
采⽤模仿学习,使⽤惯性动捕/VR/⼒触等传感器进⾏主端运动采集
提供精准⾼效的多模态数据采集、实时聚合并管理
仿真训练平台
利⽤⼈类演⽰数据,⽣成⼤规模专家策略数据集
物理信息标定的多层次多尺度仿真环境,增加sim2real适应性

具身大模型开发运维平台
采存训推⼀体化Ops平台,解决异构设备/数据源训练,数据互操作,模型知识更新,数据共享,从IOR实现RGC
具⾝模型训练任务的多级协同优化
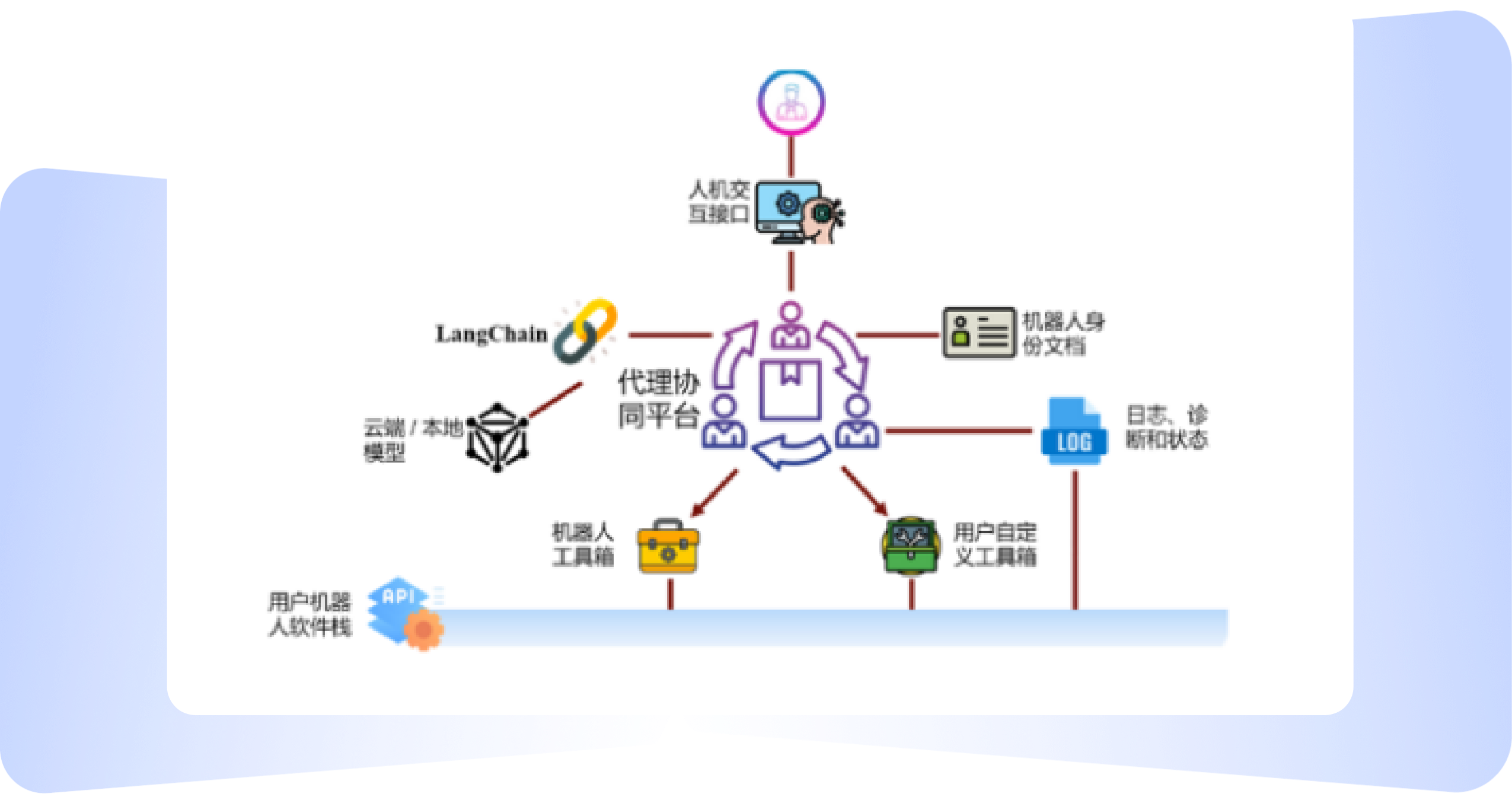
具身大模型多代理推理平台
框架⽀持多代理的灵活协作,实现复杂具⾝智能任务的执⾏
框架为ROS 2生态提供专门的工具支持,使其能够无缝集成到现有的机器人系统中,方便开发和部署
